UAV//STM32-RTH-DRONE
OPERATIONAL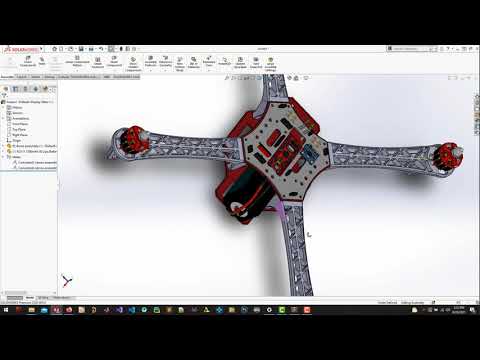
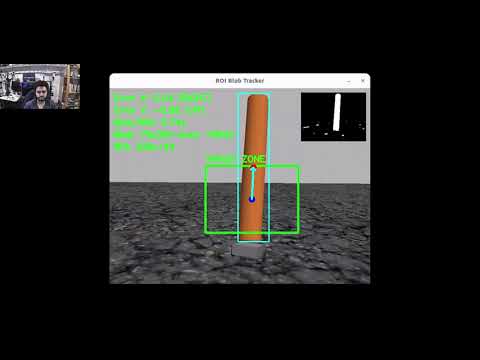
FEED LIVE
STM32 RETURN-TO-HOME DRONE
Custom PCB Flight Controller on F450 Frame
A full custom-built quadcopter featuring a hand-designed PCB flight controller using the STM32 Blue Pill. The board sits directly on top of the F450 frame, integrating GPS for autonomous return-to-home capability. Project spans 3D modeling, schematic capture, PCB layout, firmware development, and flight testing.
controllerSTM32F103C8T6
frameDJI F450
featureGPS RTH
views9,500+ on Hackster
// BILL OF MATERIALS
- ├─STM32F103C8T6 (Blue Pill)
- ├─DJI F450 Frame
- ├─Custom PCB (KiCad Designed)
- ├─GPS Module (Return-to-Home)
- ├─Brushless Motors + ESCs
- ├─3D-Printed Component Mounts
// SOFTWARE STACK
Arduino IDEKiCadSTM32C/C++GrabCAD